Description du projet
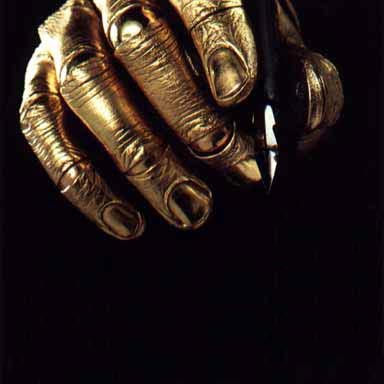
Prothèse à préhension molle qui utilise le même principe de base que la main humaine : les doigts sont formés de trois phalanges articulées avec un pouce fixe en opposition avec l’index.
« J’ai abordé le problème de la prothèse non en médecin ou en prothésiste, mais en sculpteur d’automates, donc en technicien et en artiste.
Pour l’étude technique, j’ai appliqué les principes défendus depuis de nombreuses années par le Docteur Jean-Eric LESCOEUR, c’est à dire la main à préhension molle qui empaume les objets.
C’est une prothèse mécanique à fils, dont la face dorsale, en métal, est articulée entre les phalanges et dont la face interne, en caoutchouc mousse, est recouverte de cuir souple.
J’ai pu supprimer le gant, qui gênait considérablement la préhension, et j’ai transformé la prothèse en véritable sculpture animée.
Pour que la prothèse ne soit plus un sujet de honte et de répulsion, j’ai voulu créer un objet que tous, à commencer par l’amputé lui-même, aient plaisir à regarder.
La prothèse devient ainsi pour l’entourage de l’amputé un objet de curiosité saine, celle que l’on a pour une œuvre d’art.
Je voudrais voir des amputés heureux et fiers de leur prothèse. »








Technique
- Taille réelle.
- Mouvement donné par des fils de nylon reliés à un équilibreur de force, lui-même fixé sur un fil de traction.
- La traction est fournie par un harnais fixé sur les épaules.